| 「はやぶさ」による小惑星イトカワの探査 |
川口淳一郎
(宇宙航空研究開発機構 宇宙科学研究本部教授) |
No.858(平成18年5月)号 |
1.はじめに
「はやぶさ」は、将来の本格的なサンプルリターン探査に必須で鍵となる技術を実証することを目的とする探査機で、同時に実際にこの試料の帰還を試みることを目標として、我が国第4番目の惑星探査機として2003年5月にM-V第5号機で打ち上げられた。サンプルリターン(Sample Return)技術とは、天体表面の標本を地球に持ち帰る技術であり、きわめてわずかのサンプルでも、地上の最新鋭の機器によって分析することができるという特徴がある。「はやぶさ」のめざす5つの重要技術の実証とは、
1. イオンエンジンを主推進機関として用い、惑星間を航行すること
2. 光学情報を用いた自律的な航法と誘導で、接近・着陸すること
3. 微小重力下の天体表面の標本を採取すること
4. カプセルを、惑星間飛行軌道から直接に大気に突入させ、サンプルを回収すること
5. 低推力推進機関とスウィングバイの併用による加速操作
である。図1には、「はやぶさ」の探査計画の概要を掲げた。「はやぶさ」探査機は、化学燃料とイオンエンジン駆動用のキセノンガスをあわせて約130㎏を搭載した、総質量510㎏あまりの小型の惑星間探査機である。主な航行・推進を独自の技術で築かれたイオンエンジンで行い、惑星間天体から世界で初めて試料の採取を試みる、史上例のない挑戦型の探査である。図2には射場で最終整備中の「はやぶさ」の写真を掲げた。
2.「はやぶさ」の軌道計画と、探査の概要
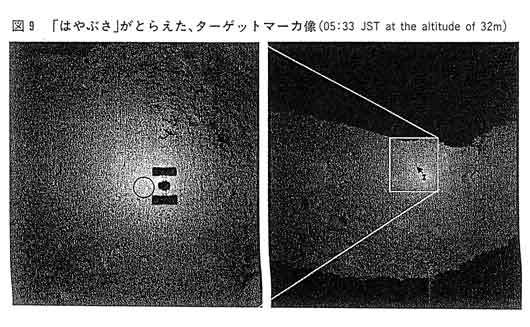
「はやぶさ」は、その目的にも掲げているように、自律的に小惑星表面に接近し、着陸を行えるよう設計されている。惑星への着陸でもっとも困難であるのは、高度方向の制御ではなく、水平方向の速度のキャンセルにある。これは計測が難しいためであり、「はやぶさ」では、表面に人工的な航法目標であるターゲットマーカを投下し、それに向けてランデブー(静止)を試みるという独自の方法で、これを解決している。ターゲットマーカは、探査機搭載のフラッシュランプで2秒ごとに照射され、フラッシュを照射しないで撮影された画像との差画像を機上で処理・作成することにより、ターゲットマーカのみを抽出するよう、特別な画像処理装置が開発され、搭載されている。ターゲットマーカは、金属製球殻の中に、ポリイミド製の小球をつめてあり、着地時にバウンドすることを最小限に抑えるべく、落下塔や航空機実験による無重量環境模擬施設を用いて開発されたものである。表面には再帰反射性をもつシートが張られている。
「はやぶさ」は、打ち上げ時点では、意図的に弾道飛行では地球に再会合しない軌道に投入され、イオンエンジンの加速で離心率を深めることで、地球に再度会合する軌道へと変更・拡大を行った。これは、理論的には、惑星間で行った軌道操作量の2倍までを再会合時のスウィングバイで引き出すという、非線型の力学系の特徴を最大限に利用した新しい独自の加速方法であり、「はやぶさ」が史上はじめて導入した技法である。「はやぶさ」のイトカワへの飛行軌道を、慣性系と太陽―地球固定系の2つの座標で図3に掲げた。矢印は9月中旬のイトカワへの到着時の地球から「はやぶさ」へ向かうベクトルを示している。
「はやぶさ」は、地球スウィングバイ後も継続してイオンエンジン加速を行い、最終的にイトカワへ到着するまで、延べ26,000時間×台の運転を達成した。「はやぶさ」搭載のイオンエンジンは、マイクロ波によるプラズマ生成、CC複合材グリッド採用による長寿命化をはかった先進的なエンジンで、この種のエンジンがこれほど長期にわたって運転に成功した例はもちろんない。本エンジンは今後の惑星探査において主力となるものと期待されており、諸外国からも大いに注目されているところである。
3.複合光学航法とランデブー
小惑星の位置は正確には推定しきれないことや、探査機の電波計測による軌道決定の精度はかなり粗く、ランデブーさせるためには、全く新たな探査機の航法手段が必要になった。電波による航法誤差の大部分は地球からの視線方向に垂直な方向に存在する。これに対し、探査機から小惑星を星座を背景にして撮影すると、探査機から小惑星に向かう方向単位ベクトルが推定できる。「はやぶさ」探査機は、この2つの航法手段を組み合わせて相補的に精度の改善をはかった。図4には、7月末から8月末にかけてイオンエンジンによる推進運用の合間をぬって実施した光学・電波複合航法の結果を掲げた。実線は探査機からみたイトカワの見える予想方向を結んだもので、丸でかこんだ点は、実際にイトカワが見えた方向を示したものである。実際に観測された情報をもとに、軌道情報を更新し(矢印)、その結果実際の観測された方向がその線上にのっていく経緯をよみとることができる。
「はやぶさ」は、8月29日にちょうどイトカワと地球をむすぶ線上の、地球方向から、距離が約4,800㎞の地点で、接近速度が約9m/secの条件で、化学エンジンを用いる接近フェーズに移行した。8月末から9月12日にイトカワへ到着するまでの間は、ほぼ毎日、探査機搭載の光学航法カメラ(ONC)と地球からの距離情報をもとに、複合航法を実施し、日々の航法誤差を数㎜/secにまで抑えるとともに、極めて微量の1㎝/sec以下の速度制御を正確に実行することにも成功した。到着・静止した瞬間のイトカワに相対的な視線方向の速度誤差は、0.25㎜/secという超高精度であった。
4.遠隔観測フェーズと科学観測成果 「はやぶさ」は、到着後からイトカワに対する相対位置制御を開始し、当初の20㎞近傍のゲートポジションから高度が7㎞ないしそれ以下のホームポジションへと高度を下げてイトカワの観測を行い、さらに10月下旬には高度を3~4㎞にまで降下させて詳細な地形や表面材料の分析観測を行った。図5には、この9月から10月にかけて行った遠隔観測フェーズにおける高度履歴を掲げた。
探査機には、この間主として太陽輻射圧が作用し、1日に1m/sec程度の加速度が加わり、この位置制御においても、降下時にはこの効果を最大限利用し、上昇時においてのみRCS(ジェット)による制御を加えて、高度維持が可能だった。
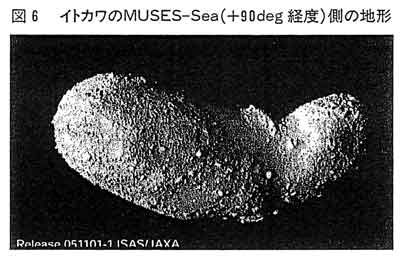
詳細な科学的な成果は、近く科学雑誌に掲載される予定である。本報告ではそれらは割愛する。全球的なイトカワ写真を図6に掲げた。
5.着陸と試料採取の試み
「はやぶさ」は、2005年10月末までに近傍観測の大半を終了し、11月に探査の中で最も困難な、着陸と試料採取に挑んだ。図7にそのシーケンスを解説した。11月に行った降下回数は延べ5回で、11月4日、11月12日にはリハーサルを、11月9日には不足していた誘導・航法に関わる機能試験を目的とした降下を行い、着陸の模擬飛行を実施した。これら3回の降下で得られた情報をもとに、11月19日(日本時間では11月20日)、11月25日(日本時間では11月26日)に、試料採取を目的とした着陸を試みている。リハーサルと誘導・航法試験(11月4日、9日、12日)では、近距離レーザ距離計(レーザレンジファインダLRF)の機能・性能の検証と、ターゲットマーカをフラッシュランプで照射し抽出して航法データをとり出す機能の確認を目的としていた。あわせて、ロボット着陸機MINERVAの投下を11月12日に試みている。
「はやぶさ」探査機は、底面から試料採取ホーンの先端までが1mしかなく、また、太陽電池板から同ホーン先端までが2mほどであるため、探査機の水平面内の投影形状内に、それらを超える高さの起伏が存在する可能性を極力小さくしなければならないという、着陸に関わる大きな制約が存在した。実際、Woomera域には、探査機の水平面内の投影形状内の起伏が1mを下回る可能性はほとんどありえず、着陸候補点としては、依然リスクを排除できないものの、MUSES-Sea域に限定されると判断せざるをえなかった。
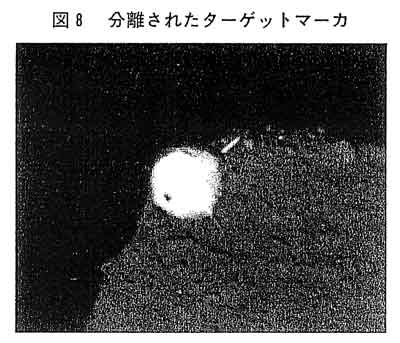
11月9日の飛行時にターゲットマーカの分離を確認した写真を、図8に掲げた。表面に投下した際の転がりを防止するための突起までもがよく確認できる。フラッシュランプによりマーカだけを抽出する画像処理機能も、計画通りに確認することができた。
MINERVAの表面への展開は、11月12日の第2回リハーサル時に試みられた。降下作業の遂行に1時間以上余計に手間取り、最接近時刻、イコール投下時刻は臼田局からキャンベラ(DNS)パス区間へと延期されることになった。結局、分離は切り替えの狭間で行われるはめになってしまい、高度200m付近で、上向きに約15㎝/secで分離されることとなったのだが、これは脱出条件を超えていて、結果としてイトカワ表面への展開は失敗であった。しかし、MINERVAは分離後も順調に機能を維持し、母船からの分離時に母船の太陽電池板をカラー撮像するとともに、それを記録して地上からの指令で再生して母船経由で伝送させるなど、MINERVAのロボットとしての機能は十分に確認された。 「はやぶさ」は、11月19日、日本時間21:00に高度約1㎞から降下を開始し、11月20日04:30に最終の垂直降下指令を送信し、正確に目的域に降下させることに成功した。解析によれば、ホバリング点への誘導・航法精度は20m程度であったと推定されている。
高度54m地点(日本時間05:28)で、ターゲットマーカの分離を指令し、高度40m(日本時間05:30)に9㎝/secの減速を行って、ターゲットマーカを表面に向けて切り離した。投下点は、MUSES-Sea南西域であった。(図9)
「はやぶさ」は、その後高度25mで残留速度をキャンセルしてホバリングを開始し、接地を目前にしていたが、搭載の障害物検出センサが、何らかのレーザ反射光を検出したため、以降の降下シーケンスを中断し、姿勢をホバリング時のままに維持しつづけ、地上からの新たな指令を待つ状態に移行することになった。図10には、「はやぶさ」が障害物を検出したのちに、2回のバウンドを経て、30分間にわたり近距離レーザ距離計測装値がほぼゼロとなった期間を示した。地上からの非常離陸指令に応答して離陸と姿勢維持を再開した時点が、同図の右端に確認できる。
第2回目のバウンドの後の姿勢角の変化は、ちょうどイトカワの自転周期に一致して変化しており、一方、この区間では、ジェットによる姿勢の復帰を試みつつも、「はやぶさ」の姿勢はイトカワの自転速度に一致して推移していて、このことは、「はやぶさ」がイトカワ重力に捕捉されていたことを示している。「はやぶさ」は世界初の小惑星から、あるいは地球圏外天体から再離陸した探査機となった。
「はやぶさ」は、2005年11月26日に第2回目の降下および接地と試料の採取を試みた。「はやぶさ」は、日本時間11月26日の午前7時7分頃に、ホバリングから下方に若干の強制加速を行った後、着地および2本のプロジェクタイル(弾丸)の発射を指令し自律的に離陸した。この第2回目の降下・着陸飛行では、試料採取ホーンの変形をレーザ距離計が検出し、プロジェクタイルの発射を指令し自律的に離陸した。この第2回目の降下・着陸飛行では、試料採取ホーンの変形をレーザ距離計が検出し、プロジェクタイルの発射が指令された場合に限って、自律離陸をするようプログラムが組まれていた。
第2回の降下着陸飛行における、接近軌道を図11に示す。左図は、軌道をほぼ慣性系に近い座標上で描いたもので、Z軸方向(図上の下方向)が地球の方向である。右図は、軌道をイトカワ固定座標系で描いたものである。(運用中に軌道計画は逐次更新されている。)
この11月26日時の、高度と降下率履歴を、図12に掲げた。左図はDSN局で計測されたドップラー速度履歴で、おおむね「はやぶさ」のイトカワへの降下速度を示し、右図は、ドップラー速度情報を積分して得られた高度を更新して表示している。高度が十分に低い地点でホバリングに移行し、地形にならう制御が行われたことがわかる。同制御後、表面に向けて強制増速を行い、ほどなくして、地表面から離陸する増速が行われていることも読みとれる。
「はやぶさ」がホバリングを行った時点では、近距離レーザ距離計のビーム3本による距離は平均で約7mに維持され、その姿勢にてホーンの軸方向に、毎秒約4㎝の加速を行って、より確実なホーンの接地をはかった。接地速度は、毎秒約10㎝と推定されている。近距離レーザ距離計は、地表面にならう制御を実施後、試料採取ホーンとの距離と反射受光量を計測するモードに切り替えられ、ホーンの変形を検出してプロジェクタイル発射の指令が出された。これらは地上に送られてきたデータから直接に確認できている。
残念ながら、離陸後の調査によって、このプロジェクタイル発射の直前に、発射回路を安全側にもどる操作が実施されたとみられており、表面の試料は、とくに第1回目の着陸時に少量が採取ホーンを伝って内部の採取器にたどりついた可能性を残すのみとなってしまった。
6.「はやぶさ」飛行の意義
「はやぶさ」は、地球圏の月以外の天体において、着陸と離陸、および試料採取にいたるシーケンスの実施に初めて成功したといえる。とくに無人のロボット探査という点において、自律的な航法と誘導による画期的に新しい惑星探査の我が国独自の手法を実証できたといえ、深宇宙探査技術面で世界の第一線にたつことができたと考えられる。今後の国内外の深宇宙探査および宇宙開発全体に、少なからず貢献できたと考えている。
当面の世界における惑星探査の技術開発の目標は、①電気推進機関による、②ランデブーで、③往復飛行を行うことであり、この三大技術を獲得することが将来の太陽系スケールでの人類の活動を拡大していくための必要条件である。表1には最近の世界の惑星探査機において、これらがどのように導入されてきたかを掲げた。
一方、試料の帰還をはかるサンプルリターン技術という面では、①ランデブー下で、かつ②ある大きさの試料採取が目標である。サンプルリターンに挑むミッションはまだまだ少ないが、いくつかNASA計画と対比して、その特徴を表2にまとめた。
「はやぶさ」だけが、この三大目標を計画し、今回の飛行で、すでに2つ目までを達成したところであり、またランデブーで、大きさをもった試料の回収をめざすのも「はやぶさ」だけである。
このように、「はやぶさ」計画が挙げた数々の成果は、いずれもが世界の今後の惑星探査をリードするものといえ、我が国をこの分野の第一線につかせたといえる。
7.「はやぶさ」の第2回着陸飛行後の探査機の状況について 11月26日に第2回目の着陸を終え、正常にイトカワを離陸した「はやぶさ」は、4時間後に上昇速度をキャンセルする軌道修正を実施した。離陸とそれに続く姿勢制御、および上昇速度をキャンセルさせる一連の操作は、この時点まですべて順調であった。しかし、これから十数分を経過した後、燃料(ヒドラジン)側からの漏洩事故が発生した。その後、2つある燃料系統A、B両系の遮断弁を閉じ、燃料の漏洩を停止させることに成功したが、正常なはずのA系化学エンジンの運転も復旧できず、翌11月28日には、A系配管の半分のスラスタ凍結と思われる事象によって姿勢制御が不調に陥り姿勢を喪失する事態にいたった。続いて12月8日の運用中にも新たな燃料漏洩に起因すると思われる姿勢異常が発生して、12月14日からは、地上の指令系と監視系を見直し・再整備をして、長期にわたる救出運用を開始した。 これにともない、2007年春からイオンエンジンを運転して、2010年6月に地球帰還させる計画に変更した。 2007年の2月にイトカワ軌道からの完全な離脱を行い、地球に2010年の6月に帰還させる探査機軌道計画(案)を図13に示した。帰還までの飛行時間が長くなるものの、現在の残キセノン薬量で飛行可能であることが判明している。
8.復旧の経緯と状況の要旨 1ヶ月半をおいて、2006年1月23日には、予想通りに「はやぶさ」探査機からのビーコン信号の受信に成功した。リチウムイオンバッテリが使用不能の状態となっているほか、化学エンジンも、1月に通信が復旧するまでの間に、燃料のほかに酸化剤も新たに大量に漏出したもようで、計測器の指示上は残量がともにない状態にある。しかし、イオンエンジン運転用のキセノンガスは、12月に通信不能に陥った状態の圧力を保っており、残存しており、これが唯一の姿勢軌道制御の手段として残っている。2月6日からは、このキセノンガスの噴射による太陽指向制御を開始し、3月中旬からは、中利得アンテナによる256bpsのテレメトリ信号の受信までに回復をしている。 3月6日には、得られた距離計測データとドップラー情報をもとに軌道決定が実施され、正確な探査機の位置・速度が新たに推定できた。「はやぶさ」は、同日現在、イトカワから(概ねイトカワの進行方向に)約13,000㎞の距離にあり、相対速度毎秒約3mで飛行しており、探査機の太陽からの距離は約1億9,000万㎞、地球からの距離は約3億3,000万㎞であった。
9.「はやぶさ」の今後の運用見通し 探査機内には、なお相当量の燃料ないし酸化剤が残留している可能性があり、軌道が確定し、探査機の姿勢制御ロジックの更新を終えたのち、ヒータを用いて全体の温度を上昇させるベーキングを実施する計画でいる。この後、回収カプセルのベーキングや、回収カプセル内に、試料容器を移送してフタを閉める操作、さらに続いて探査機内の温度を最も高くしうる、イオンエンジン運転状態でのベーキングを実施していく予定である。このために、数ヶ月間をかけて、イオンエンジンを1台ずつ起動させていき、同時に3台運転の状態まで運用を行う計画である。 現在の「はやぶさ」搭載のキセノンガスの残量は、約42~44㎏と推定されていて、今後、新たな燃料等のガス噴出による姿勢喪失が発生しなければ、姿勢制御に要する消費量を考慮しても、地球帰還に向けたイオンエンジンの運転に要するキセノンガスの確保は可能である。2006年の後半には、イオンエンジン運転を開始したいと考えている。
10.おわりに 最後に、「はやぶさ」には、非常に多くの方から心配と激励をいただき、ここに感謝申し上げたい。「はやぶさ」は、実に小さな宇宙船であるが、太陽系規模での大航海時代をさきがけるパイロットプロジェクトである。「はやぶさ」からつながるこれからの時代をよく見通し、若い世代の方々が、これを超えてさらなる貢献をしてもらえるよう期待するものである。
参考文献
1.Proceedings of Asteroid Sample and Return Workshop, ISAS, June 29, 1985
2.Kawaguchi, J., Scientific Satellites Prospect, ISAS Report, No.43, ISSN 0285-2853, Dec., 1986
3.Kawaguchi, J. et al., LAUNCH READINESS OF THE MUSES-C, A SAMPLE AND RETURN FROM AN ASTEROID, IAC-02-Q.5.2.04, 53rd International Astronautical Congress, 10-19 Oct., Houston, TX, 2002
4.M.Kaasalainen, CCD photometry and model of MUSES-C target(25143)1998 SF36, A&A 405, L29-L32(2003)
5.Jun’ichiro Kawaguchi, MUSES-C LAUNCH AND EARLY OPERATIONS REPORT, AAS/AIAA Astrodynamics Specialists Conference, AAS-03-662, Big Sky Resort, Big Sky, Montana, August 3-7, 2003
6.Jun’ichiro Kawaguchi, et al., The Ion Engines Cruise Operation and the Earth Swingby of ‘Hayabusa’(MUSES-C), IAC-04-Q_5_02, Oct. 4-8, 2004, Vancouver, Canada
7.Jun’ichiro Kawaguchi, et al., HAYABUSA(MUSES-C)-RENDEZVOUS AND PROXIMITY OPERATION, IAC-05-A3.5.A.01, Oct. 16-21, 2005, Fukuoka, Japan
8.Jun’ichiro Kawaguchi, et al., GUIDANCE AND NAVIGATION OPERATION FOR REHEARSALS AND TOUCH-DOWNS IN HAYABUSA, AAS 06-183, Jan. 23-26, Palm Harbor, Florida
(宇宙航空研究開発機構 宇宙科学研究本部教授・京大・工・昭53)
|